Straßenbahn- bzw. Stadtbahnsysteme erleben eine weltweite Renaissance. Die Betreiber der Systeme sind bestrebt, für den Angebotsausbau in Form von Taktverdichtungen oder neuen Linien die Kosten der Systeme und ihren Energieverbrauch weiter zu senken sowie deren Zuverlässigkeit und Sicherheit zu steigern. Die Automatisierung der Straßenbahn nimmt hierbei eine wichtige Stellung ein. In diesem Beitrag wird eine Methodik zur Wahl einer Realisierungsmöglichkeit für die Abstandshaltung im Sinne des Gegen- und Flankenschutzes dargestellt. Dieser Methodik folgend können die Sicherheitsanforderungen für die weitere Betriebsfunktionen abgeleitet werden.
Seit seiner Entstehung erlebt der Schienenverkehr einen ununterbrochenen Wandlungsprozess. Das ist auf die Verringerung von Unfallzahlen, Gewährleistung eines fahrplantreuen Bahnbetriebs und die Erfüllung von aktuell geltenden Zielsetzungen von Politik und Wirtschaft wie z.B. Klimaschutz gerichtet. Je nach Wirkungsbereich – Fahrweg, Fahrzeug, Leit- und Sicherungstechnik – kommen hierfür unterschiedliche Maßnahmen zum Einsatz. Diese können sich durch die Einführung von neuen Technologien und Techniken auszeichnen.
Hinsichtlich der ambitionierten Pariser Klimaziele rücken klimafreundliche Verkehrsmittel wie die Straßenbahn zunehmend in den Fokus der gesellschaftlichen Diskussion um eine Mobilität der Zukunft. Das ist auf mehrere Gründe zurückzuführen: Gegenüber dem Bus hat des Rad-Schiene-System einen geringeren spezifischen Energieverbrauch sowie eine höhere Kapazität und Zuverlässigkeit; im Vergleich zu unterirdischen Metrosystemen ergeben sich geringere Infrastrukturkosten.
Autonom fahrende Pkw und Kleinbusse werden bereits heute zum Zweck eines kommerziellen Einsatzes erprobt. Fahrassistenzsysteme zur Kollisionsvermeidung oder Abstandshaltung haben bei motorisierten Personenfahrzeugen wie Pkw ihre Marktreife erlangt und werden in Neufahrzeugen serienmäßig eingesetzt. Die Automatisierung des Schienenverkehrs schreitet bereits seit den 1970er Jahren voran. Nach der erfolgreichen Einführung von automatischen U-Bahnen und der auf der Linienzugbeeinflussung (LZB) aufsetzenden Automatischen Fahr-/Bremssteuerung (AFB), sind in den letzten Jahren auch Techniken zur weiteren Automatisierung von Vollbahnen entstanden.
Im vorliegenden Beitrag sollen die für die Automatisierung relevanten Betriebsaufgaben der Straßenbahn dargestellt werden. Nachfolgend wird diskutiert, wie diese technisch realisiert werden können – durch die bekannten Anwendungen des automatisierten Straßen- oder Schienenverkehrs. Der Schwerpunkt des Beitrags liegt in der der Methodik zur Wahl einer geeigneten Automatisierungstechnik für die Ausführung von sicherheitsrelevanten Betriebsaufgaben. Hierbei wird der Schwerpunkt auf die Betriebsaufgabe „Ausführung einer Fahrt“ gelegt.
Betriebsfunktionen im Straßenbahnbetrieb
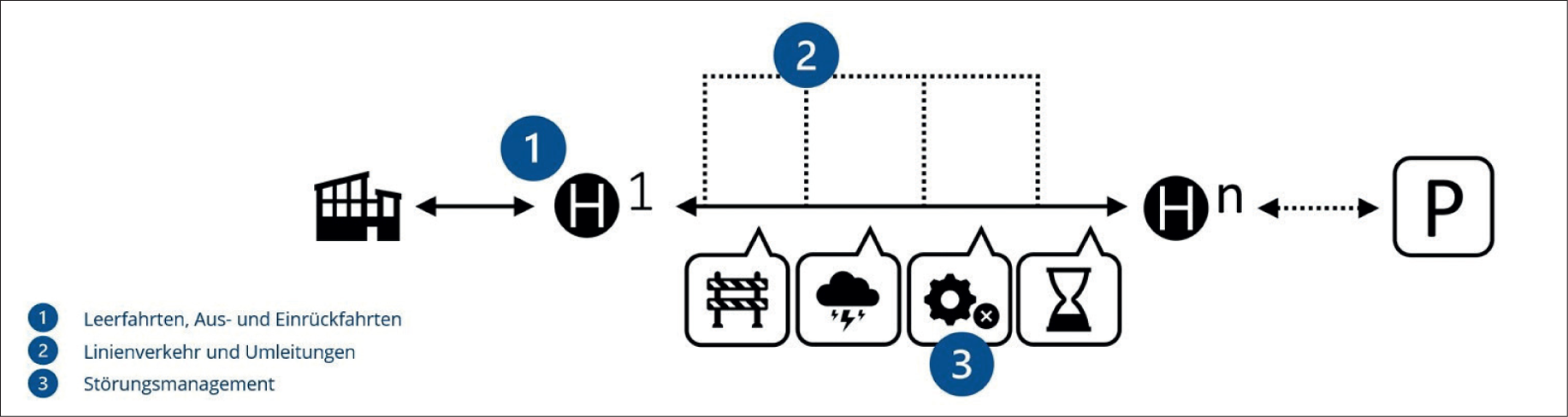
Abbildung 1 zeigt einen Überblick eines Fahrzeugumlaufes im kommerziellen Einsatz. Links dargestellt ist ein Depot, das der „Heimatort“ eines Fahrzeugs ist, in dem die Fahrzeugbehandlung sowie auch Wartungsarbeiten durchgeführt werden. Zwischen dem Depot und der ersten Haltestelle (H1) finden Leerfahrten statt. An den Haltestellen erfolgt der Fahrgastwechsel. Bis zur letzten Haltestelle (Hn) fährt das Fahrzeug über eine vorgegebene Linienstrecke.
Die Piktogramme zeigen mögliche Einflüsse, die während einer Fahrt auftreten können: Kollisionen mit systemfremden Fahrzeugen und Objekten (Zaunsymbol), schlechtes Wetter (Wolkensymbol), Fahrzeugstörungen (Zahnradsymbol) oder auch allgemeine Verzögerungen im Betriebsablauf (Sanduhrsymbol). Solche Einflüsse können Auswirkungen auf die Sicherheit und Pünktlichkeit des Fahrzeugs ausüben. Aus dem dargestellten Fahrzeugeinsatz können folgende Betriebsfunktionen abgleitet werden: Betriebsfunktionen für
- die Fahrzeugbehandlung im Depot
- den Fahrgastwechsel
- die sichere Fahrzeugbewegung auf der Strecke
Den untergesetzlichen Rahmen für den Betrieb von Straßenbahnen bildet in Deutschland die Straßenbahn-Bau- und Betriebsordnung (BOStrab). In dieser wird zwischen Bahnen mit Zugsicherungstechnik und Bahnen ohne Zugsicherungstechnik unterschieden. In den Straßenbahnsystemen mit Zugsicherung sind bereits leit- und sicherungstechnische Systeme in Einsatz. Die Zugsicherung ist eher selten und betrifft nur wenige Einsatzfälle z.B. bei Fahrt im Tunnel.
Der häufigste Fall in Deutschland ist das Fahren auf Sicht. Die Kompetenz zur sicheren Durchführung der Fahrt sowie Fahrzeugbehandlung und Fahrgastwechsel wird dabei den Fahrzeugführenden zugesprochen. Hierbei haben diese unterschiedliche Aufgaben zu erfüllen: Bei der Durchführung einer Fahrt sind Kollisionen und Entgleisungen zu vermeiden. Bei dem Fahrgastwechsel soll das korrekte Ein- und Ausstiegsvorgang ausgeführt werden. Die Fahrzeugbehandlung hat die Überprüfung von Fahrzeugfunktionen als Ziel. Nachfolgend konzentriert sich der Beitrag auf die für die Durchführung einer Fahrt maßgebenden Aufgaben.
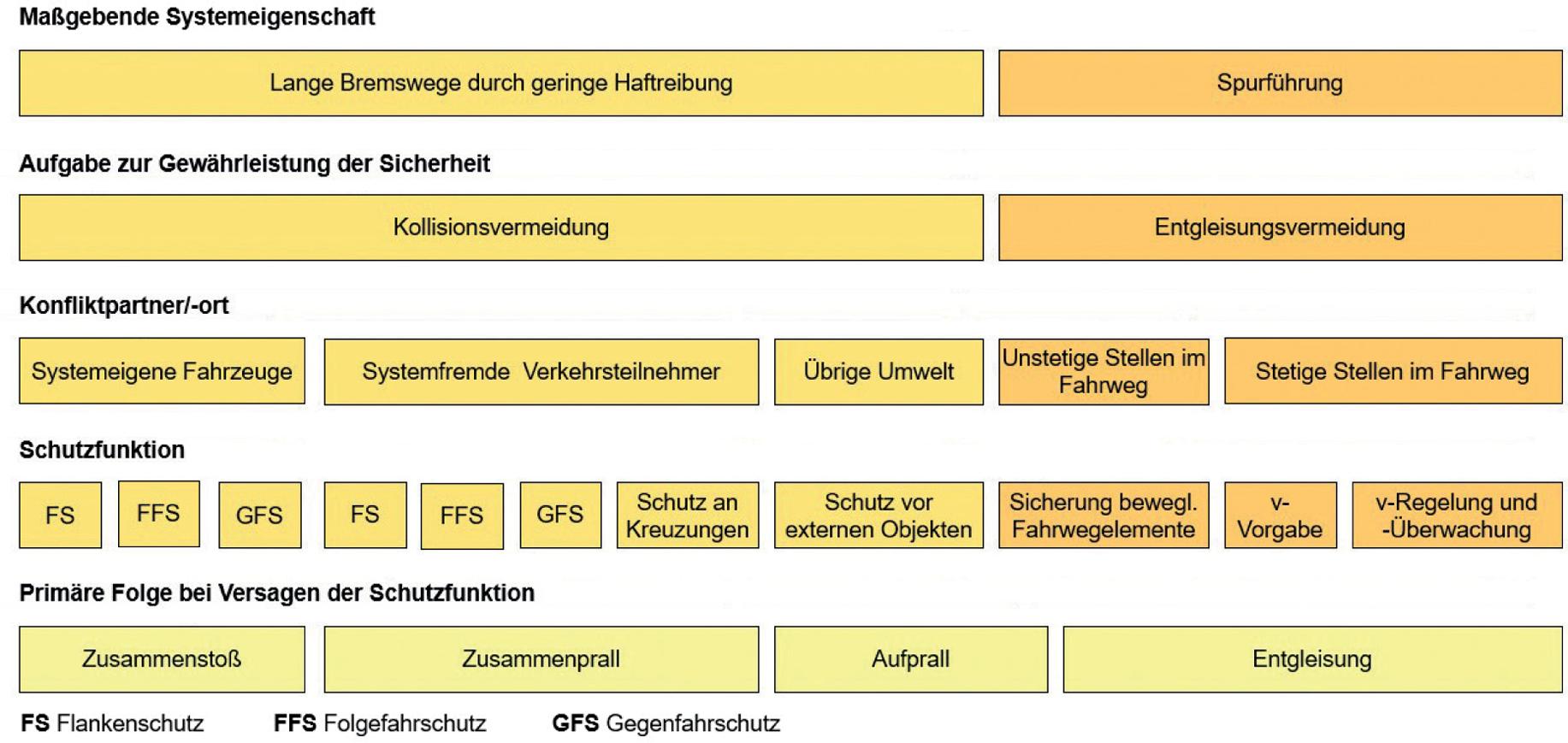
Unter Bezugnahme auf die bei der Durchführung einer Fahrt zu erbringenden Aufgaben im Schienenverkehr (Abbildung 2), können maßgebende Schutzfunktionen abgeleitet werden. Diese gilt es, unabhängig vom Automatisierungsgrad zu erfüllen. Hierbei ist zwischen den Aufgaben zu unterscheiden, die für ein grundsätzliches Funktionieren des Bahnsystems erforderlich sind (Kernaufgaben) und denen, die sich durch Einfluss von systemexternen Faktoren ergeben (Zusatzaufgaben).[1]
Zu den Kernaufgaben der Sicherungstechnik gehören die Flanken, Folge- und Gegenfahrschutz sowie Sicherung von beweglichen Fahrwegelementen. Für die Zusatzaufgaben ist charakteristisch, dass diese nur mittelbar auf eine bereits stattfindende Fahrt wirken. Nachdem die Nichterfüllung einer dieser Aufgabe bekannt ist, muss auf die Fahrzeugbewegung Einfluss genommen werden, um diese zu verlangsamen oder anzuhalten. Nachfolgend sind die Zusatzaufgaben dargestellt:
- Schutz an niveaugleichen Kreuzungen
- Schutz an Haltestellen
- Schutz vor externen Objekten
- Geschwindigkeitsvorgabe
- Geschwindigkeitsregelung und -überwachung
Diese können grundsätzlich in zwei Gruppen unterteilt werden:
- Aufgaben zur Sicherung von Gefahrenbereichen und
- Aufgaben zur Geschwindigkeitsregelung
Automatisierung der Straßenbahn
Zum aktuellen Zeitpunkt werden die dargestellten Kern- und Zusatzaufgaben überwiegend von den Fahrzeugführenden übernommen. Die Zugsicherungstechnik ist gemäß BOStrab nur dann vorgesehen, wenn ein Fahren auf Sicht unmöglich und nicht sicher erscheint, so z. B. beim Befahren von Tunnelabschnitten.
Je nach vorgesehenem Automatisierungsgrad werden die Aufgaben durch die Fahrzeugführenden, mit Unterstützung von Fahrassistenzsystemen (FAS) und von der Technik ausgeführt. Unter dem Begriff FAS versteht man eine technische Unterstützung der Fahrzeugführenden bei bestimmten Fahraufgaben. So werden zum Beispiel sicherheitsrelevante Betriebsfunktionen des Fahrzeugs wie Abstandshaltung oder Hinderniserkennung zusätzlich durch ein technisches System überwacht. Das Fahrassistenzsystem hat dabei das Ziel, Schaden vom Fahrzeug abzuwenden und wirkt unterstützend. Dieser ist jedoch grundsätzlich für die sichere Durchführung der Fahrt verantwortlich. Im Unterschied dazu ist beim automatischen Fahren die Technik für die sichere Durchführung der Fahrt zuständig. Das Fahrzeug erkennt, beurteilt und handelt ohne menschlichen Eingriff. Fahrzeugführende sind in diesem Fall nicht mehr existent.
Die Norm IEC 62267 [3] gibt einen Überblick über die Automatisierungsgrade (Grades of Automation, GoA) im schienengebundenen Verkehr. Die ersten beiden Stufen (GoA 0 On-Sight und GoA 1 NTO) werden bereits bei den Stadtbahnsystemen umgesetzt. Mit dem langfristigen Ziel, einen vollautomatisierten Betrieb der Stufe GoA4 (UTO) zu erreichen, besteht vorerst die Notwendigkeit zur Automatisierung von einzelnen Teilprozessen der Stufen GoA 2 (STO) und GoA 3 (DTO).
Automatisierung von Kernaufgaben
Zur Automatisierung von Kernaufgaben gibt es zwei Möglichkeiten: der Einsatz von bekannten Anwendungen des Schienen- oder Straßenverkehrs.
Bei den Eisenbahnen werden die Kernaufgaben mit ETCS (ab Level 2) und ESTW umgesetzt. Ähnlich können auch bei der Straßenbahn die Informationen über die systemeigenen Fahrzeuge sowie über die Weichenstellungen durch das entsprechende Aufrüsten der Infrastruktur und der Fahrzeuge sowie Gestaltung von zuverlässigen Kommunikationsverbindungen zum Informationsaustausch realisiert werden.
Bei Stadtbahnsystemen wie S- oder U-Bahn wird das CBTC-System zur Umsetzung dieser Aufgaben angewendet. Eine Realisierung technischer Schutzmaßnahmen zwischen den Schienenfahrzeugen ist mithilfe eines CBTC-Systems auch in einem Straßenbahnsystem denkbar. In diesem Fall sind aber lediglich systemeigene Fahrzeuge abgesichert, nicht jedoch andere Verkehrsteilnehmende (Zusatzaufgaben). Die Abdeckung letzterer muss somit durch andere Lösungsansätze erfolgen (siehe folgender Abschnitt). Eine Herausforderung beim Einsatz von CBTC besteht in der technischen Anbindung von Weichen des historisch gewachsenen Straßenbahnnetzes an die Sicherungslogik.
Die Anwendung von fahrzeugseitigen Lösungsansätzen ist für den automatisierten Straßenverkehr üblich. Zur typischen Ausrüstung gehören die Systeme und Komponenten zur Umfeldwahrnehmung (Kamera, Lidar, Radar), Fahrzeugortung (GNSS, Odometrie), Datenverarbeitung und Kommunikation (LTE, 5G, V2X).

Automatisierung von Zusatzaufgaben
Bei der Fahrt auf einem unabhängigen Bahnkörper ist die Automatisierung von Zusatzaufgaben bereits zum Teil durch die bauliche Trennung realisiert. Die Gefahr stellen die Kreuzungspunkte mit motorisiertem Individualverkehr (MIV) und Reisenden an den Haltestellen dar. Die Beherrschung dieser Gefahren wäre durch den Einsatz von Lichtsignalanlagen, Bahnsteigtüren bzw. Sensoren zur Gefahrenraumüberwachung möglich.
Eine Herausforderung stellt die Fahrt auf einem straßenbündigen Bahnkörper dar. Die Betriebsweise gleicht hier der im MIV. Deshalb erscheint es zielführender, Systeme zur Kollisionsvermeidung aus dem MIV zu adaptieren und dem Straßenbahnbetrieb anzupassen. Zur Realisierung bestünde die Notwendigkeit einer fahrzeugseitigen Ausrüstung mit Radar, Lidar und Kamera-Sensorik, die eine kontinuierliche Abstandsmessung zu anderen Verkehrsteilnehmenden ermöglichen.
Die durch die Betriebsleitung oder die StVO festgelegten Geschwindigkeitsbegrenzungen sind für den Fahrbetrieb maßgebend. Eine Automatisierung dieser Betriebsfunktion ist vielseitig denkbar. Es bestünde die Möglichkeit – ähnlich einer CBTC-Anwendung – Streckendaten (wie z. B. Geschwindigkeitsbeschränkungen) auf den Fahrzeugrechner zu übertragen und deren Einhaltung in Verbindung mit einer GPS-Ortung oder einer videobasierten Ortung zu überprüfen. Streckenseitig wäre der Einsatz der Odometrie sowie On-Board-Units (OBU) und Road-Site-Units (RSU) möglich.
Ableitung der Sicherheitsanforderungen
Doch welcher der weiter oben vorgestellten Anwendungsmöglichkeiten ist für die Straßenbahnanwendung am besten geeignet? Hierfür können verschiedene Kriterien betrachtet werden. Zieht man die Wirtschaftlichkeit als Kriterium ein, so scheint es sinnvoll, auf einem unabhängigen Bahnkörper dem Einsatz des Schienenverkehrs zu folgen. Auf dem straßenbündigen Bahnkörper ist hingegen mehr der Einsatz des Straßenverkehrs angebracht.
Stellt man die technische Reife von Systemen in den Fokus, erscheint der Einsatz von fahrzeugseitigen Systemen aufgrund von noch mangelnden Eigenschaften zum aktuellen Zeitpunkt nicht sinnvoll und zielführend.
Betrachtet man die unterschiedlichen Eigenschaften der Verkehrssysteme Straße und Schiene, so wird sichtbar, dass die Sicherheitsanforderungen an die Abstandssicherung im Sinne von Flanken- und Gegenfahrschutzes sich je nach System unterscheiden. Die Sicherheitsanforderungen an den Folgefahrschutz sind in beiden Anwendungsfällen identisch, da der Bremsweg der Straßenbahn entscheidend ist und die Gefahrenabwehr durch den MIV nicht angenommen wird. An die Technik zur Abstandssicherung zwischen zwei Straßenbahnen werden höhere Anforderungen gestellt, als an die Technik zur Abstandssicherung zwischen einer Straßenbahn und einem Straßenfahrzeug. Der Grund dafür liegt größtenteils an der Möglichkeit zur Gefahrenabwehr durch Ausweichmanöver des Pkw. Dieser Sachverhalt soll nachfolgend näher betrachtet werden.
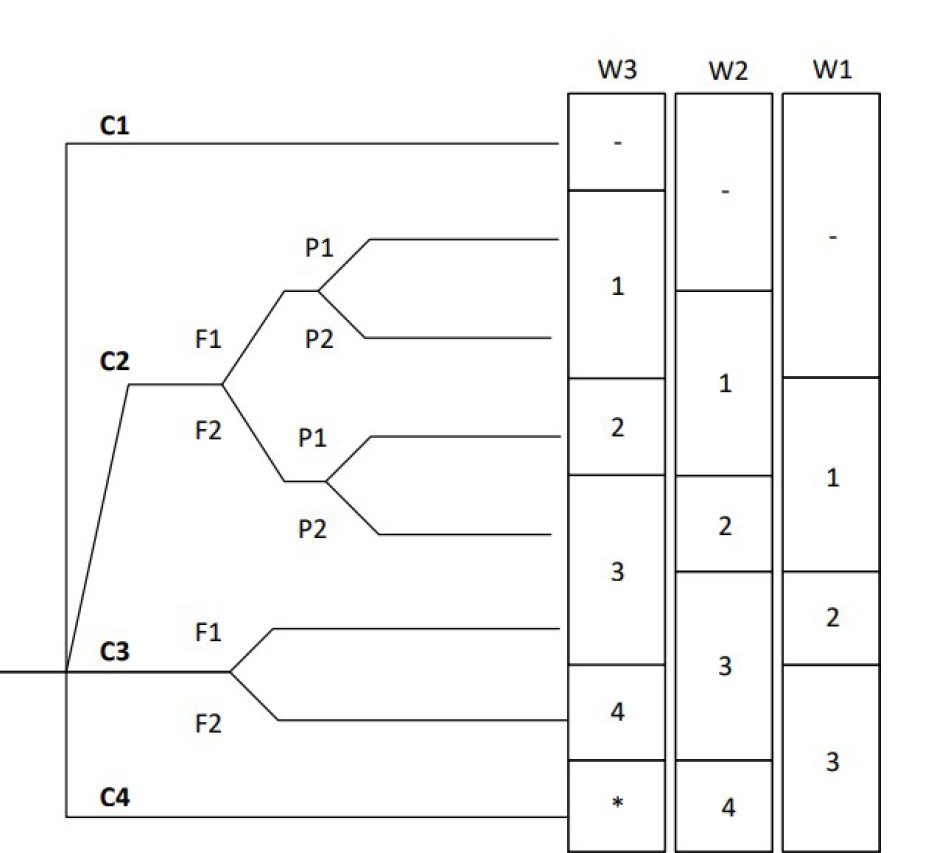
Um eine Kernaussage zu dem erforderlichen Sicherheitsniveau zu treffen, kann ein semi-quantitatives Risikoverfahren angewendet werden. Hierbei wird auf die Anwendung des Risikographen gesetzt.[5] Grundsätzlich soll die Frage beantwortet werden, wie sich ein Versagen der Technik zur Abstandssicherung auf beteiligte Personen und das System auswirkt. Die Art der technischen Realisierung der Funktion ist für die nachfolgende Betrachtung ohne Bedeutung. Es wird eine Fahrt auf einem straßenbündigen Bahnkörper betrachtet. Zur Bestimmung der SIL werden die Faktoren Schadensaumaß, Häufigkeit des Aufenthalts, Gefahrenabwehr und Eintrittswahrscheinlichkeit einzeln bewertet und nachfolgend miteinander verknüpft. Die Beschreibung und Bewertung von Kriterien sind Tabelle 1 zu entnehmen.
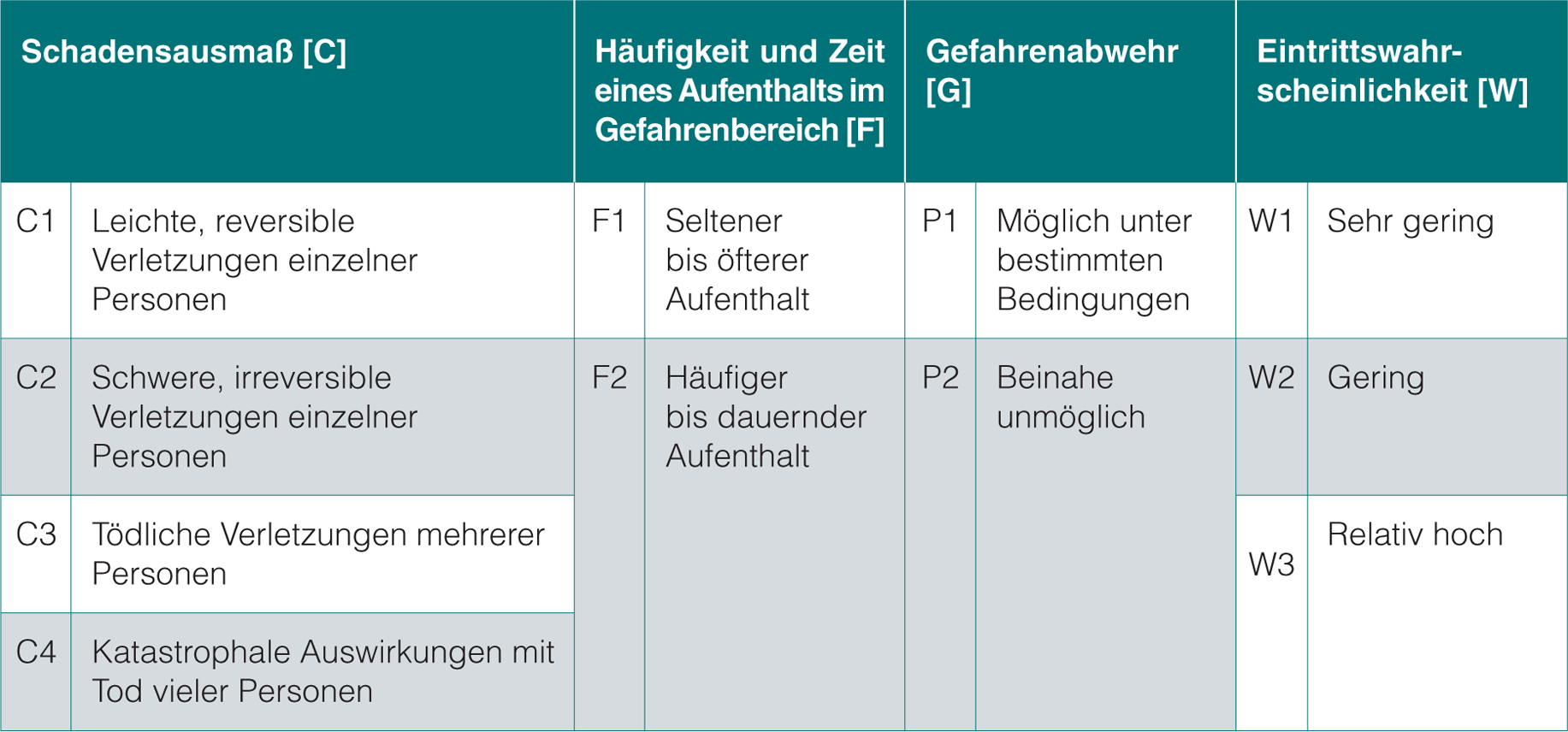
Die Bewertung der Eintrittswahrscheinlichkeit ist auf zwei Arten möglich. Einerseits wird es immer wieder zu Unfällen kommen, sobald die sichere Abstandshaltung nicht möglich ist, also W3: relativ hoch. Andererseits kann bei der Ermittlung der Eintrittswahrscheinlichkeit auf das Einhalten der mindestens gleichen Sicherheit gesetzt werden. Im Straßenverkehr sind die Unfälle mit Beteiligung von Straßenbahnen relativ seltene Ereignisse.[4] Bei den wenigsten Unfällen ist die Straßenbahn Hauptverursacher (16 Prozent Straßenbahn, 45 Prozent Pkw, 22 Prozent Fußgänger). Aus diesem Grund wird die Eintrittswahrscheinlichkeit mit „W2: gering“ bewertet.
Es ist grundsätzlich mit einer Mehrzahl von Fahrgästen im Straßenbahnfahrzeug zu rechnen. Jedoch sind auch andere Verkehrsteilnehmende (sowohl MIV als auch schwache Verkehrsteilnehmer) dem Fahrzeug exponiert und können somit bei Unfällen betroffen sein. Aus diesem Grund wird die Häufigkeit eines Aufenthaltes mit „F2: Häufiger bis dauernder Aufenthalt“ eingeschätzt.
Die maßgebende Gefahrenabwehr stellt ein Ausweichmanöver anderer Verkehrsteilnehmender dar. Ausgehend von den geringeren Geschwindigkeiten, hoher Verbreitung von FAS im Pkw, sowie hoher Manövrierbarkeit von MIV wird die Gefahrenabwehr mit „P1: möglich“ bewertet. Betrachtet man nur die Straßenbahnfahrzeuge so ist die Gefahrenabwehr mit „P2: beinahe unmöglich“ zu bewerten.
Kombiniert man die Faktoren mittels Risikographen, kann für die Abstandshaltung zwischen zwei Straßenbahnfahrzeugen die Sicherheitsanforderung SIL 2 und zwischen einem motorisierten Individualfahrzeug wie Pkw und Straßenbahnfahrzeug die SIL 1 abgeleitet werden (Abbildung 3).
Zusammenfassung
Eine Möglichkeit zur Erhöhung der Sicherheit, Energieeinsparung sowie Taktverdichtung bietet die Automatisierung der Straßenbahn an. Bei den für die Automatisierung relevanten sicherheitsrelevanten Betriebsaufgaben ist nach den Kern- und Zusatzaufgaben zu unterscheiden. Erstens kann man dadurch die Besonderheiten bzw. Eigenschaften des jeweiligen Verkehrssystems berücksichtigen. Dies ermöglicht die bessere Ausarbeitung von Anforderungen (Zuverlässigkeit) an die Technik zum automatisierten Fahren. Zweitens können auf diese Weise die Hauptfunktionen (z. B. Gefahrendetektion, Geschwindigkeitsregelung) ermittelt werden, die bei der Entwicklung eines automatisierten Systems umgesetzt werden müssen. Drittens kann dadurch die bessere Unterscheidung der Funktionen je nach Typ des Bahnkörpers erfolgen.
Der Zeitpunkt der Ausführung von Kern- und Zusatzaufgaben variiert nach Automatisierungsgrad. In den niedrigeren Automatisierungsgraden haben die Fahrzeugführenden die Schutzfunktionen zu gewährleisten. In den höheren Automatisierungsgraden muss diese Aufgabe durch die Technik übernommen werden. In diesem Beitrag wurde eine Methodik zur Wahl einer Realisierungsmöglichkeit für die Abstandshaltung im Sinne des Gegen- und Flankenschutzes dargestellt. Dieser Methodik folgend können die Sicherheitsanforderungen für die weitere Betriebsfunktionen abgeleitet werden.
Literatur
[1] Trinckauf, J.; Buder, J.; Menzel, D.: Moderne Zugsicherung – Anforderungen und Grenzen, Signal+Draht, 2020, Heft 1+2.
[2] Maschek, U.: Sicherung des Schienenverkehrs, Grundlagen und Planung der Leit- und Sicherungstechnik, 4. überarbeitete und erweiterte Auflage, Springer Fachmedien, 2018, Wiesbaden.
[3] International Electrotechnical Commission: IEC 62267, Railway applications – Automated urban guided transport (AUGT) – Safety requirements.
[4] Gesamtverband der Deutschen Versicherungswirtschaft e.V., GDV 56, Unfallforschung kompakt – Maßnahmen zur Reduzierung von Straßenbahnunfällen, 2016.
[5] Verband Deutscher Verkehrsunternehmen: VDV 331 – Sicherheitsintegritätsanforderungen für Signal- und Zugsicherungsanlagen gemäß BOStrab, 2008.
Lesen Sie auch:
Artikel als PDF laden